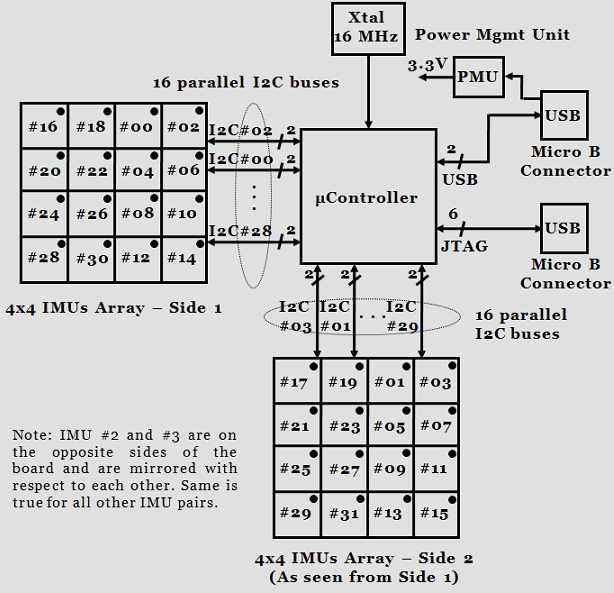
The Osmium MIMU4844 / MIMU4462 - contains 32 IMUs, with two mirrored 4x4 square IMU arrays. MIMU4844 / MIMU4462 is an ideal platform to implement very high precision motion sensing by using Sensor Fusion and Array Signal Processing methods. It is an easy to use and highly configurable sensor-array platform, serves the needs for niche applications, such as gait analysis, 3D motion capture, Structure from Motion (SfM) etc. It is supported with open-source software for foot mounted pedestrian navigation.
*The difference between MIMU4844 and MIMU4462 is the IMU's model number. MIMU4844 includes 9-axis IMU ICM-20948, whereas MIMU4462 makes use 6-axis IMU MPU-6500. Communication interface of MIMU4844 is fully compatible with MIMU4462. MIMU4462 is the 6-axis version of MIMU4492. MIMU4444's (a previous version) support material can be referred for MIMU4844 and MIMU4462 also.
Please visit Support section for resources, tutorials, FAQs etc and Blog for more information on technology.
")

")

