(24-Oct-2018) Henk Kortier et al of Saxion University Netherlands present their research work titled "MIMU PDR with bias estimation using an optimization based approach", at IPIN'18 Nantes, France. A framework to mitigate drift effects in IMU based PDR systems is presented. Batched optimization procedure is applied to keep track of the biases which may change because of environmental variations and other reasons.
Particle Filter with MIMU
(03-Oct-2018) A research team from Chinese Academy of Sciences and Shanghai Tech University has proposed a pedestrian heading particle filter algorithm for correcting heading error of MIMU PDR sensors. For this, indoor digital map informaiton is used. It has been demonstrated that the algorithm effectively suppresses the continuous accumulation of directional errors.
(11-Sep-2018) OsmiumScope is an Android based R&D tool for Osmium MIMU22BL/P(X), which allows data logging and analysis. It is useful for STEM experiments. OsmiumScope receives and plots motion data, i.e. 3-axis acceleration, 3-axis angular rotation speed and 3-axis magnetic strength, in real-time from Osmium MIMU22BL/P(X) via Bluetooth. It also saves data in logfile.
OsmiumScope can also be used for animating 3D rotation of Osmium MIMU22BL/P(X).
OsmiumScope allows user to set Osmium MIMU22BL/P(X)'s output data rate, choice of selecting data for displaying or/and logging. One may decide the precision of data for logging purpose. User may even select / deselect on-board IMUs for study purpose. OsmiumScope allows selecting combination of any one, any two or all four on-board IMUs. OsmiumScope also allows sending any command to Osmium MIMU22BL/P(X) from smartphone, and saves the corresponding output data in a log file.
(11-Sep-2018) OsmiumScope is an Android based R&D tool for Osmium MIMU22BL/P(X), which allows data logging and analysis. It is useful for STEM experiments. OsmiumScope receives and plots motion data, i.e. 3-axis acceleration, 3-axis angular rotation speed and 3-axis magnetic strength, in real-time from Osmium MIMU22BL/P(X) via Bluetooth. It also saves data in logfile.
OsmiumScope can also be used for animating 3D rotation of Osmium MIMU22BL/P(X).
OsmiumScope allows user to set Osmium MIMU22BL/P(X)'s output data rate, choice of selecting data for displaying or/and logging. One may decide the precision of data for logging purpose. User may even select / deselect on-board IMUs for study purpose. OsmiumScope allows selecting combination of any one, any two or all four on-board IMUs. OsmiumScope also allows sending any command to Osmium MIMU22BL/P(X) from smartphone, and saves the corresponding output data in a log file.
(21-Apr-2018) The indoor positioning technologies can be categorized into "relative" and "absolute" positioning. Typically wireless based technologies offer absolute positioning, whereas IMUs and laser based technologies offer relative positioning. Fusion of multiple technologies from different categories offer the best positioning solution.
A brief comparative analysis of various indoor positioning technologies are presented here.
5G Testing with Shoe Sensors
(20-Mar-2018) 5G wireless networks will pave the way for the future. Everything from smart cities to self-driving cars and even virtual reality education. In partnership with the City of Ottawa, the CRC has built an outdoor 5G test site at City Hall to show that 5G mobile devices can communicate using millimetre waves and how to increase 5G coverage without adding transmitters. Watch their short video to learn about this world-leading research and outdoor demonstration.
The shoe-sensor gave the position of the backpack transmitted over an LTE link, so that the base station could decide which antenna (and engineered surface combination) to use when transmitting data.
Research on Indoor Navigation Using PDR Sensor
(07-Mar-2018) Laura Ruotsalainen et al of FGI Finland present research on developing a method for infrastructure-free simultaneous localization and mapping (SLAM) and context recognition for tactical situational awareness. A shoe-mounted PDR is part of a multi-sensor indoor navigation system. Sophisticated error modelling and
implementation of integration algorithms are key for providing a viable result. Error modelling and implementation of advanced fusion algorithms are essential for providing a viable result for tactical applications, especially for dismounted soldiers, or rescue personnel. The results show significant improvement on the horizontal localization when the measurement errors are carefully modelled and their inclusion into the particle filtering implementation correctly realized.
(08-Feb-2018) The Osmium MIMU22BL has significantly enhanced feature set as compared to its predecessor MIMU22B9. Some of these are - low power operation, availablity of internal compass, support for remote battery monitoring, enhanced height data with pressure sensor fusion, option to program Bluetooth and availablity of generic connectors for programming.
Besides, we have made available Python and Android open APIs. Android application of MIMU22BL - DaReX - contains option of tracking on Google map, and many other advanced options for changing settings of MIMU22BL without the need of JTAG programming.
(31-Jan-2018) Amit, Founder of Inertial Elements, has been honored with the ‘Young Entrepreneur Award 2018’ by The Indus Entrepreneur (TiE) - UP Chapter in recognition of his outstanding achievements showing an intensity of purpose, a skill for innovation and relentless pursuit of excellence, for his spirit and passion for venturing into the unknown.
Amit dedicates this award to the passionate team of Inertial Elements.
New Release - The Osmium MIMU22BL
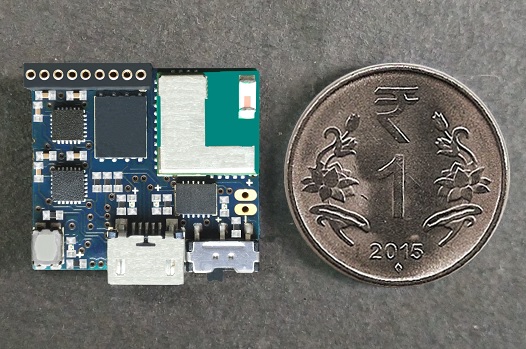
(09-Jan-2018) Introducing a new Pedestrian Dead Reckoning (PDR) sensor - The Osmium MIMU22BL – at this year’s 2018 Consumer Electronics Show. The Osmium MIMU22BL, which is based on InvenSense 9-axis IMU ICM-20948, is a miniaturized motion sensing multi-IMU (MIMU) platform for shoe-based real-time indoor pedestrian localization in GPS denied environment. It finds applications in indoor real-time location systems (RTLS) for industrial workers and first responders. It also has applications in robotics, urban mapping, gait analysis, AR/VR etc.
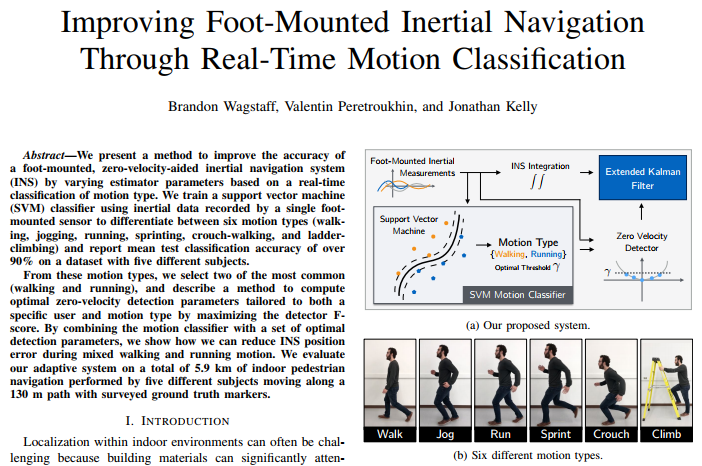
(26-Dec-2017) Brandon Wagstaf et al of UTIAS present a method to improve the accuracy of shoe-based PDR sensor by varying estimator parameters based on a real-time classification of motion type. They train a support vector machine (SVM) classifier to differentiate between six motion types (walking, jogging, running, sprinting, crouch-walking, and laddr climbing). From these motion types, they select two of the most common (walking and running), and describe a method to compute optimal zero-velocity detection parameters.
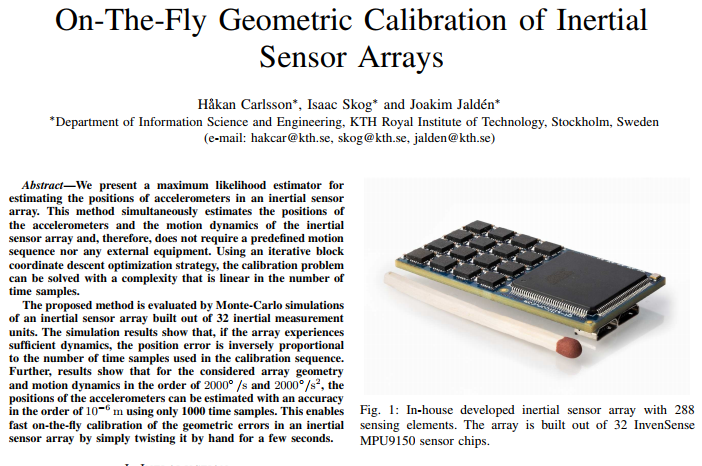
(12-Dec-2017) H˚akan Carlsson et al of KTH present a maximum likelihood estimator for estimating the positions of accelerometers in an inertial sensor
array. This method simultaneously estimates the positions of the accelerometers and the motion dynamics of the inertial sensor array and, therefore, does not require a predefined motion sequence nor any external equipment. Using an iterative block coordinate descent optimization strategy, the calibration problem can be solved with a complexity that is linear in the number of time samples.
(30-Nov-2017) There are typically three categories of multi-sensor systems. First, classical sensors system with different types of collocated sensors. Second, sensor joint systems wherein multiple same type of sensors coordinate to predict state of a system. The third kind of multi sensors system consists of collocated sensors with the same properties. The redundancy due to multiple sensors, results not only in enhanced noise performance of the system, but also allows the multi sensor system to achieve what single sensor system can not. On one hand enhancing capabilities, shrinking size and reducing cost of MEMS sensors favor redundancy, but on the other hand data communication, processing and calibration compensation pose system level challenges.
Noise and Power Performance of MIMU systems
(01-Oct-2017) Evolution of a multi-IMU shoe-mounted inertial navigation system is presented in this article. The overall study suggests that by selecting a well-designed operating point, a multi-IMU system can be made cost, size and power efficient without practically affecting its superior positioning performance. The superior positioning performance and enhanced power efficiency enable many critical applications requiring infra-free indoor positioning. Innovative products and services around such low-cost PDR sensor would fuel further big innovations, and unleash its mass market applications.
(10-Jun-2016) Isaac Skog (Researcher, Signal Processing Department, KTH, Sweden) explains how the combination of motion model (the zero-velocity-update approach) and sensor fusion (the multi-IMU approach) improve performance and thus enable indoor positioning and motion sensing applications with the help of ultra low cost inertial sensors.
Pedestrian Dead Reckoning with Foot Sensors
(20-Jan-2016) PDR is simplified with our foot sensor - The Osmium MIMU22BTP. In simple words, the sensor detects steps, computes displacement and heading of each detected step with respect to the previous one and transmit it over Bluetooth to the application platform (Phone/Tab/Radio) for construction of the tracked path.
Warehouse management, first responders' tracking, augmented reality, indoor navigation, gait analysis, geo-sruvey etc are some of the applications of such sensors. For some applications, output of the foot sensor can be fused with other navigation technologies (like GPS) and sensors to achieve better results at optimized cost.
Foot Sensors for Indoor LBS and IoT Applications
(11-Jan-2016) Thorough experimental study is conducted on the Osmium MIMU22BTP to investigate the performance that can be expected in mass market applications. The encouraging test results indicate its potential for a variety of indoor Location Based Services (LBS) and IoT applications based on foot-mounted inertial sensing and dead reckoning. Innovative use of social media network, cloud services and Big data analysis with the wearable Osmium MIMU22BTP would fuel big innovation and unleash its potential.
The paper also covers very good overview of the MIMU22BTP sensor system.
We are CII's "Top 10 Promising Start-ups"
(16-Dec-2015) We are pleased to share that GT Silicon has been chosen as the "Top 10 Promising Start-Ups" in the CII Industrial Innovation Awards 2015. CII's press release
About CII: The Confederaton of India Industry (CII), founded in 1895, is a non-government, not-for-profit, industry-led and industry-managed organization, playing a proactive role in India's development process. CII works to create and sustain an environment conducive to the development of India, partnering industry, Government, and civil society, through advisory and consultative processes.
Massive Sensors Array for Precision Sensing
(22-Sep-2015) More than a billion smartphones being sold annually and growing with CAGR of 16%, the smartphone industry has become a driving force in the development of ultralow-cost inertial sensors. Unfortunately, these ultra low-cost sensors do not yet meet the needs of more demanding applications like inertial navigation and biomedical motion tracking systems. However, by adapting a wisdom of the crowd’s thinking and design arrays consisting of hundreds of sensing elements, one can capitalize on the decreasing cost, size, and power-consumption of the sensors to construct virtual high-performance low-cost inertial sensors. Team at KTH, Sweden and WUSTL, USA share findings and challenges.
Are Our Foot Sensors Robust Enough
(10-July-2015) The implemented navigational algorithm of an inertial navigation system (INS), along with the hardware configuration, decides its tracking performance. Besides, operating conditions could also influence the performance. The Osmium MIMU22BTP was tested under various conditions - type of shoe, walking surface, walking speed, path profile, ambient temperature and number of on-board inertial sensors). We observe very robust tracking performance of MIMU22BTP. The average relative errors are less than 3 to 4% under all the conditions, with respect to drift, distance and height, indicating a potential for a variety of location based services based on foot mounted inertial sensing and dead reckoning.
DST - Lockheed Martin Innovation Award (IIGP)
(13-May-2015) Thank you IIGP for adjudging GT Silicon winner of the prestigious innovation award.
About IIGP: The India Innovation Growth Programme (IIGP) is a joint initiative of the Department of Science and Technology (DST), Govt. of India; Lockheed Martin Corporation; Indo-US Science and Technology Forum (IUSSTF), Federation of Indian Chambers of Commerce and Industry (FICCI); Stanford Graduate School of Business and the IC2 Institute at the University of Texas. The aim of this programme is to accelerate innovative Indian technologies into the global markets.
Demonstrating Pedestrian Navigation
(20-Jan-2016) PDR is simplified with our foot sensor - The Osmium MIMU22BTP. In simple words, the sensor detects steps, computes displacement and heading of each detected step with respect to the previous one and transmit it over Bluetooth to the application platform (Phone/Tab/Radio) for construction of the tracked path.
Warehouse management, first responders' tracking, augmented reality, indoor navigation, gait analysis, geo-sruvey etc are some of the applications of such sensors. For some applications, output of the foot sensor can be fused with other navigation technologies (like GPS) and sensors to achieve better results at optimized cost.
Foot-mounted Sensors for Simplified PDR
(28-Oct-2014) Despite being around for almost two decades, foot-mounted inertial navigation only has gotten a limited spread. Contributing factors to this are lack of suitable hardware platforms and difficult system integration. As a solution to this, we present an open-source wireless foot-mounted inertial navigation module with an intuitive and significantly simplified pedestrian dead reckoning interface. The interface is motivated from statistical properties of the underlying aided inertial navigation. In summary, the module provides a modularization of the foot-mounted inertial navigation and makes the technology significantly easier to use.
Navigation Technology For Fire Fighters
(2-Oct-2014) Take a look at the fire-fighters who take on the blaze from the inside, and the technology that's created to help them. This video covers testing of the Tactical Locator (TOR) system developed by KTH Royal Institute of Technology, using foot-mounted sensors - The Osmium MIMU22BTP - to aid navigation.
The technology will save more lives from fires while making the work of a firefighter safer. A foot sensor - small embedded computer - in the heal of the firefighter's shoe allows for the leader of the rescue operation to follow the firefighters movements and location throughout the coordinated rescue operation -- without any infrastructure.
Inertial Sensor Array Calibration Made Easy !
(11-Sep-2014) Ultra-low-cost single-chip inertial measurement units (IMUs) combined into IMU arrays are opening up new possibilities for inertial sensing. However, to make these systems practical, calibration and misalignment compensation of low-cost IMU arrays are necessary and a simple calibration procedure that aligns the sensitivity axes of the sensors in the array is needed. Team at KTH suggests a novel mechanical-rotation-rig-free calibration procedure based on blind system identification and a platonic solid (Icosahedron) printable by a contemporary 3D-printer. Matlab-scripts for the parameter estimation and production files for the calibration device are made available.